CRI就是kubelet 把对容器的操作,统一地抽象成一个接口。这样,kubelet 就只需要跟这个接口打交道了。而作为具体的容器项目,比如 Docker、 rkt、runV,它们就只需要自己提供一个该接口的实现,然后对 kubelet 暴露出 gRPC 服务即可。
基本原理
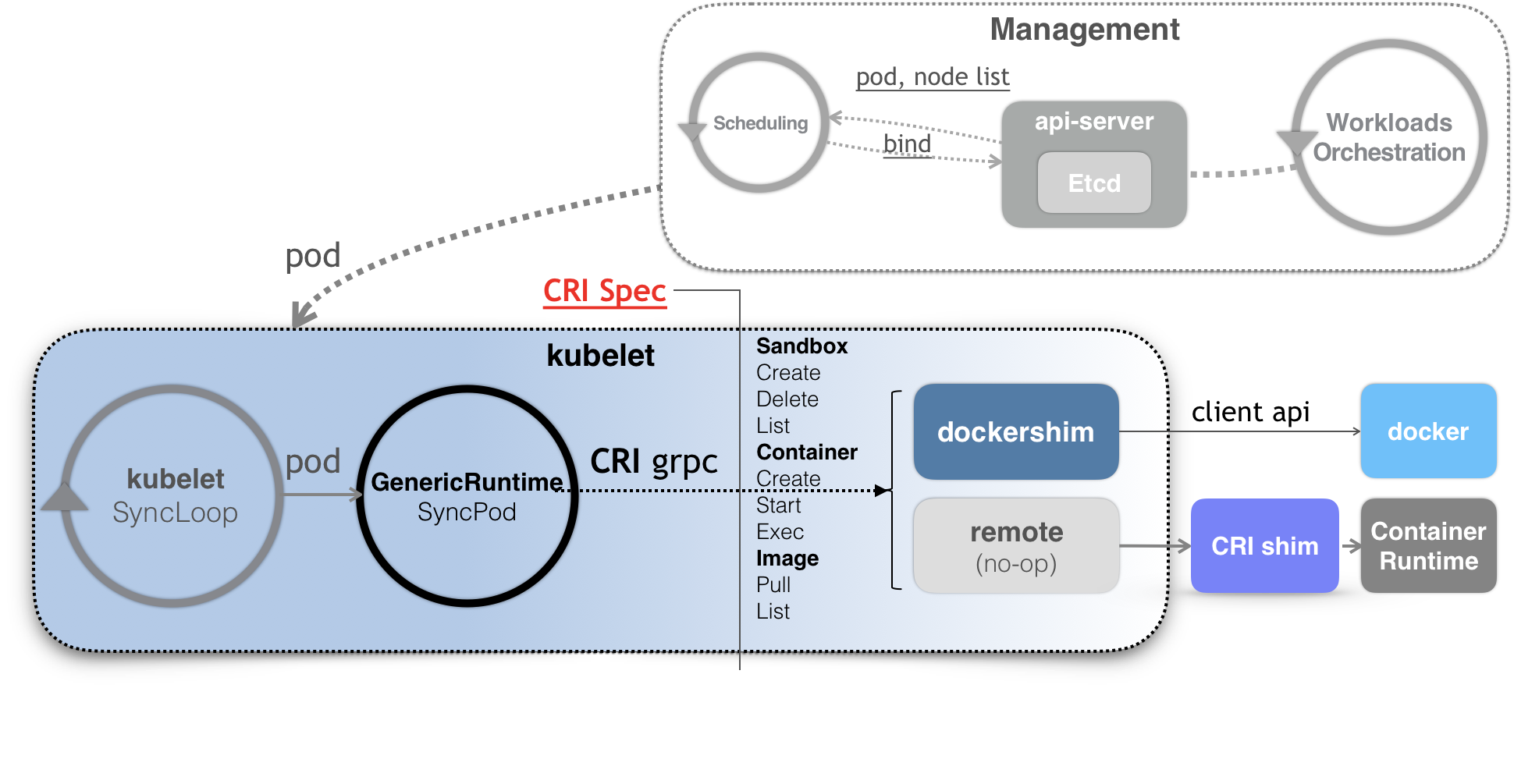
当 Kubernetes 通过编排能力创建了一个 Pod 之后,调度器会为这个 Pod 选择一个具体的节点来运行。这时候,kubelet 当然就会通过前面讲解过的 SyncLoop 来判断需要执行的具体操作,比如创建一个 Pod。那么此时,kubelet 实际上就会调用一个叫作 GenericRuntime 的通用组件来发起创建 Pod 的 CRI 请求。
如果你使用的容器项目是 Docker 的话,那么负责响应这个请求的就是一个叫作 dockershim 的组件。它会把 CRI 请求里的内容拿出来,然后组装成 Docker API 请求发给 Docker Daemon。需要注意的是,在 Kubernetes 目前的实现里,dockershim 依然是 kubelet 代码的一部分。当然,在将来,dockershim 肯定会被从 kubelet 里移出来,甚至直接被废弃掉。
普遍的场景,就是你需要在每台宿主机上单独安装一个负责响应 CRI 的组件,这个组件,一般被称作 CRI shim。顾名思义,CRI shim 的工作,就是扮演 kubelet 与容器项目之间的“垫片”(shim)。所以它的作用非常单一,那就是实现 CRI 规定的每个接口,然后把具体的 CRI 请求“翻译”成对后端容器项目的请求或者操作。
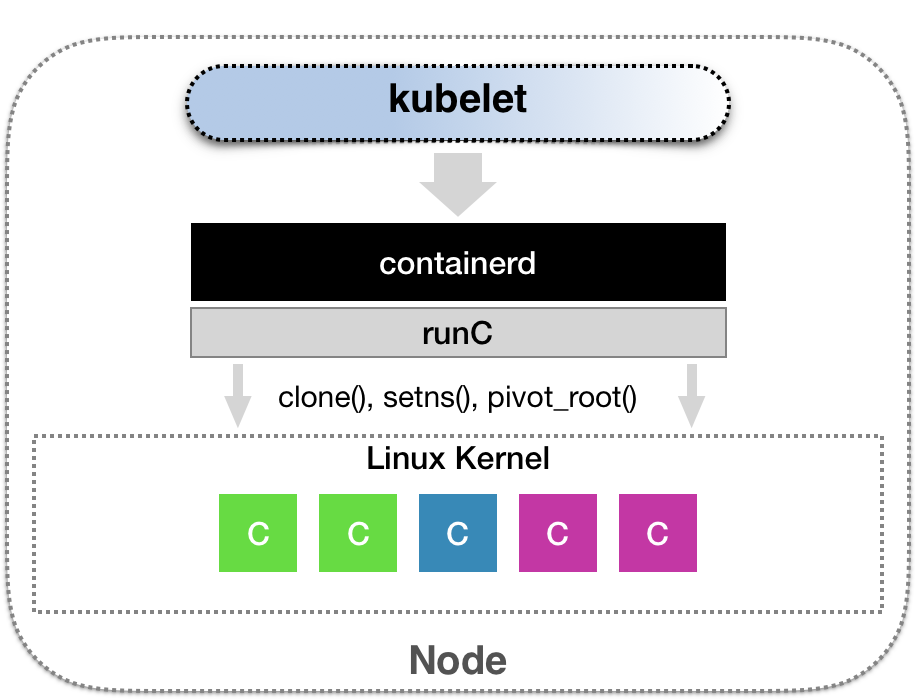
举个例子。CNCF 里的 containerd 项目,就可以提供一个典型的 CRI shim 的能力,即:将 Kubernetes 发出的 CRI 请求,转换成对 containerd 的调用,然后创建出 runC 容器。而 runC 项目,才是负责执行我们前面讲解过的设置容器 Namespace、Cgroups 和 chroot 等基础操作的组件。
作为一个 CRI shim,containerd 对 CRI 的具体实现还是很复杂的
CRI的实现
我们先来看一下 CRI 这个接口的定义。
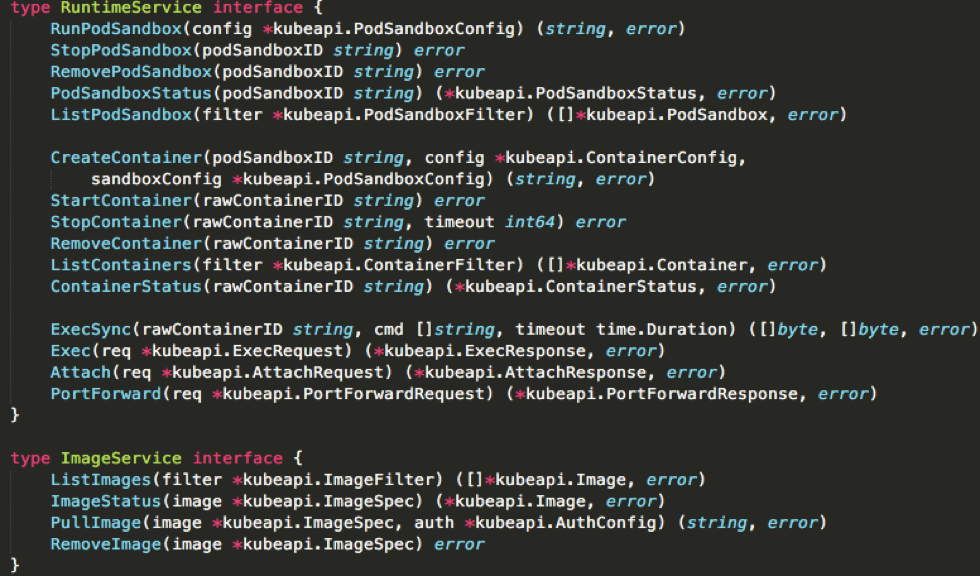
我们可以把 CRI 分为两组:
- 第一组,是 RuntimeService。它提供的接口,主要是跟容器相关的操作。比如,创建和启动容器、删除容器、执行 exec 命令等等。
- 第二组,则是 ImageService。它提供的接口,主要是容器镜像相关的操作,比如拉取镜像、删除镜像等等。
核心就是RuntimeService 部分,在这一部分,CRI 设计的一个重要原则,就是确保这个接口本身,只关注容器,不关注 Pod。
- Pod 是 Kubernetes 的编排概念,而不是容器运行时的概念。所以,我们就不能假设所有下层容器项目,都能够暴露出可以直接映射为 Pod 的 API。
- 如果 CRI 里引入了关于 Pod 的概念,那么接下来只要 Pod API 对象的字段发生变化,那么 CRI 就很有可能需要变更。而在 Kubernetes 开发的前期,Pod 对象的变化还是比较频繁的,但对于 CRI 这样的标准接口来说,这个变更频率就有点麻烦了。
所以,在 CRI 的设计里,并没有一个直接创建 Pod 或者启动 Pod 的接口。有一组叫作 RunPodSandbox 的接口的。这个 PodSandbox,对应的并不是 Kubernetes 里的 Pod API 对象,而只是抽取了 Pod 里的一部分与容器运行时相关的字段,比如 HostName、DnsConfig、CgroupParent 等。所以说,PodSandbox 这个接口描述的,其实是 Kubernetes 将 Pod 这个概念映射到容器运行时层面所需要的字段,或者说是一个 Pod 对象子集。具体的容器项目,你就需要自己决定如何使用这些字段来实现一个 Kubernetes 期望的 Pod 模型。
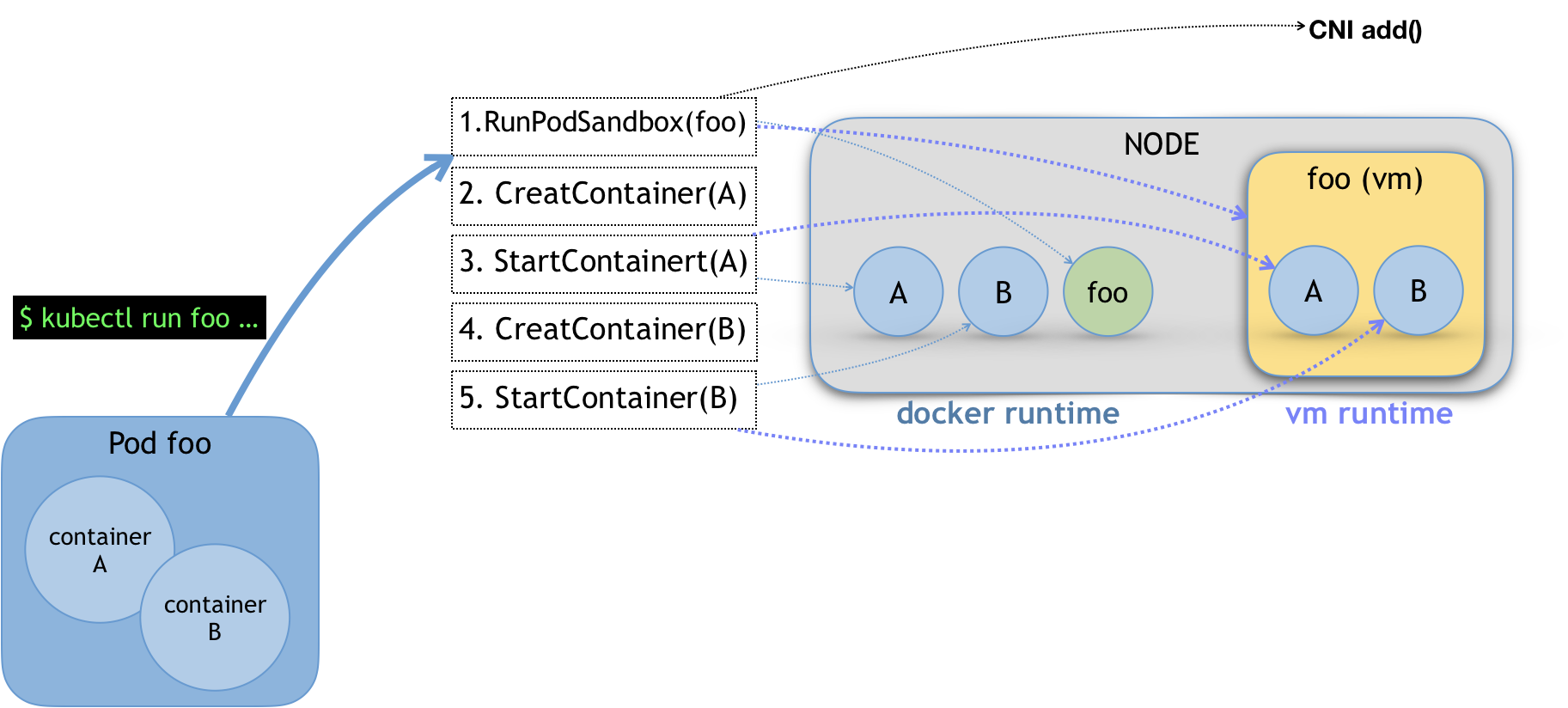
当我们执行 kubectl run 创建了一个名叫 foo 的、包括了 A、B 两个容器的 Pod 之后。这个 Pod 的信息最后来到 kubelet,kubelet 就会按照图中所示的顺序来调用 CRI 接口。在具体的 CRI shim 中,这些接口的实现是可以完全不同的。比如,如果是 Docker 项目,dockershim 就会创建出一个名叫 foo 的 Infra 容器(pause 容器),用来“hold”住整个 Pod 的 Network Namespace。而如果是基于虚拟化技术的容器,比如 Kata Containers 项目,它的 CRI 实现就会直接创建出一个轻量级虚拟机来充当 Pod。
在 RunPodSandbox 这个接口的实现中,你还需要调用 networkPlugin.SetUpPod(…) 来为这个 Sandbox 设置网络。这个 SetUpPod(…) 方法,实际上就在执行 CNI 插件里的 add(…) 方法,也就是我在前面为你讲解过的 CNI 插件为 Pod 创建网络,并且把 Infra 容器加入到网络中的操作。
kubelet 继续调用 CreateContainer 和 StartContainer 接口来创建和启动容器 A、B。对应到 dockershim 里,就是直接启动 A,B 两个 Docker 容器。所以最后,宿主机上会出现三个 Docker 容器组成这一个 Pod。而如果是 Kata Containers 的话,CreateContainer 和 StartContainer 接口的实现,就只会在前面创建的轻量级虚拟机里创建两个 A、B 容器对应的 Mount Namespace。所以,最后在宿主机上,只会有一个叫作 foo 的轻量级虚拟机在运行。
CRI shim 还有一个重要的工作,就是如何实现 exec、logs 等接口。这些接口跟前面的操作有一个很大的不同,就是这些 gRPC 接口调用期间,kubelet 需要跟容器项目维护一个长连接来传输数据。这种 API,我们就称之为 Streaming API。CRI shim 里对 Streaming API 的实现,依赖于一套独立的 Streaming Server 机制。
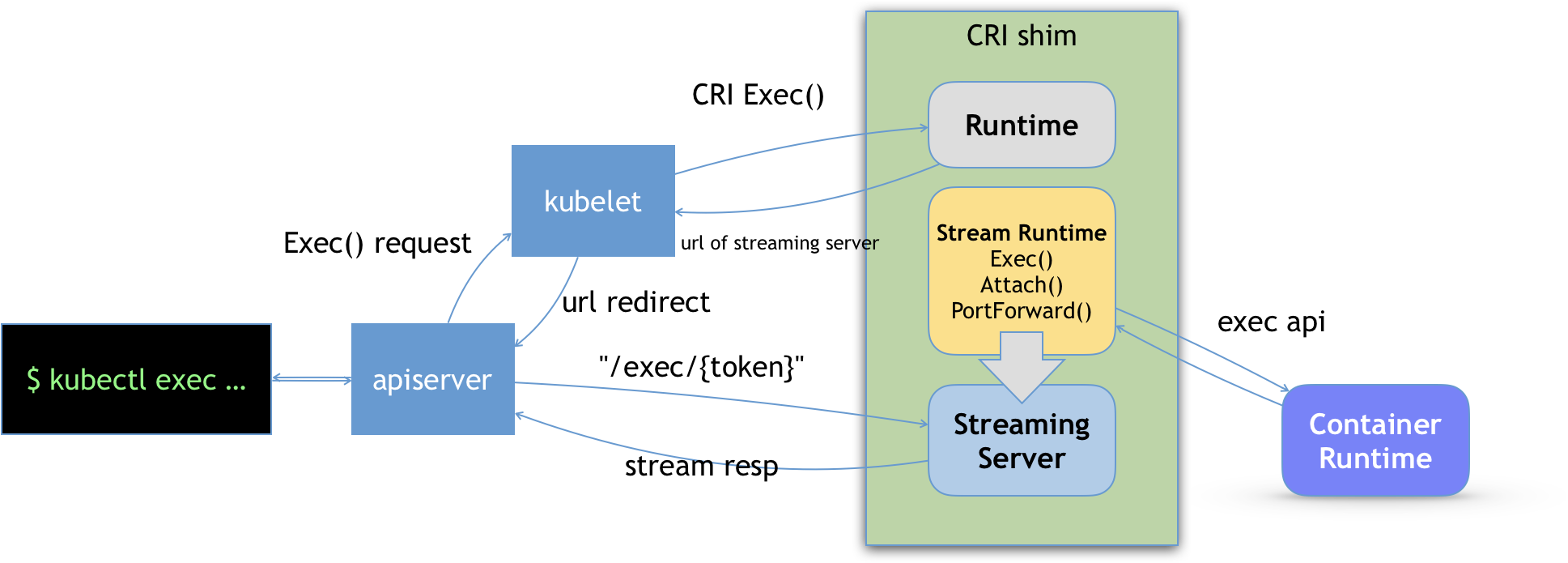
可以看到,当我们对一个容器执行 kubectl exec 命令的时候,这个请求首先交给 API Server,然后 API Server 就会调用 kubelet 的 Exec API。这时,kubelet 就会调用 CRI 的 Exec 接口,而负责响应这个接口的,自然就是具体的 CRI shim。但在这一步,CRI shim 并不会直接去调用后端的容器项目(比如 Docker )来进行处理,而只会返回一个 URL 给 kubelet。这个 URL,就是该 CRI shim 对应的 Streaming Server 的地址和端口。而 kubelet 在拿到这个 URL 之后,就会把它以 Redirect 的方式返回给 API Server。所以这时候,API Server 就会通过重定向来向 Streaming Server 发起真正的 /exec 请求,与它建立长连接。当然,这个 Streaming Server 本身,是需要通过使用 SIG-Node 为你维护的 Streaming API 库来实现的。并且,Streaming Server 会在 CRI shim 启动时就一起启动。此外,Stream Server 这一部分具体怎么实现,完全可以由 CRI shim 的维护者自行决定。比如,对于 Docker 项目来说,dockershim 就是直接调用 Docker 的 Exec API 来作为实现的。
容器技术
docker
docker就是我们最常用的容器技术,k8s一开始也是基于docker来做的,随着生态的越来越成熟,渐渐的发展的标准接口,docker也就成为实现中的一员。