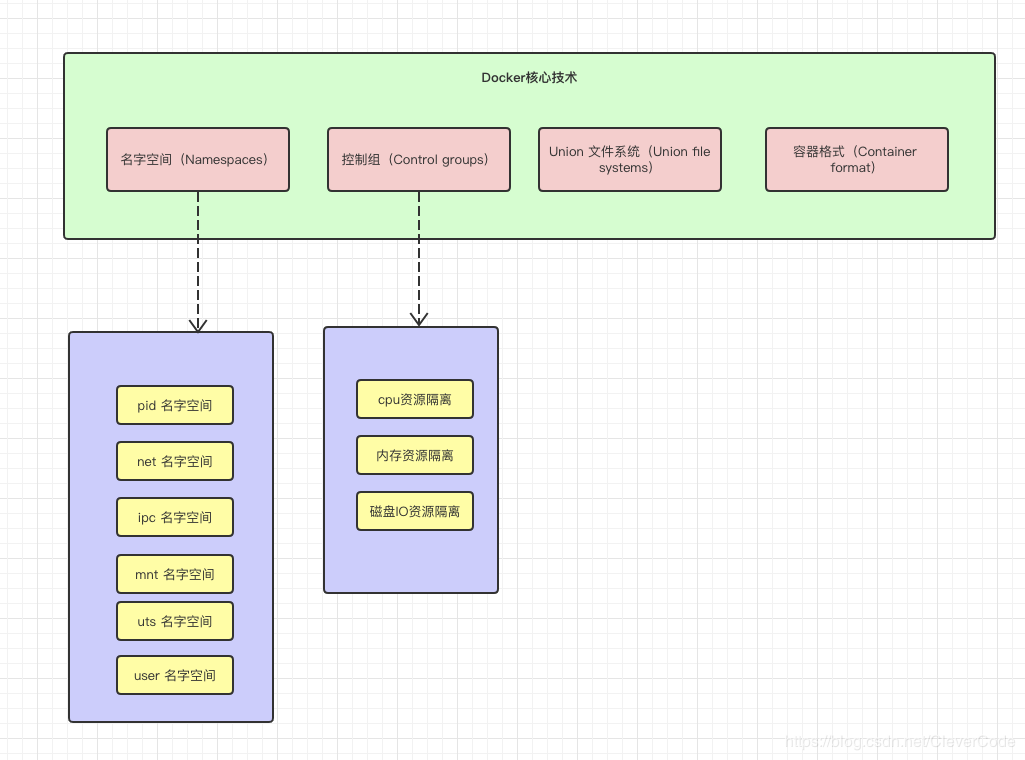
Docker实质上是汇集了linux容器(各种namespaces)、cgroups以及“叠加”类文件系统(changeroot)等多种核心技术的一种复合技术。
架构
Docker 是一个 C/S 模式的架构,后端是一个松耦合架构,模块各司其职。
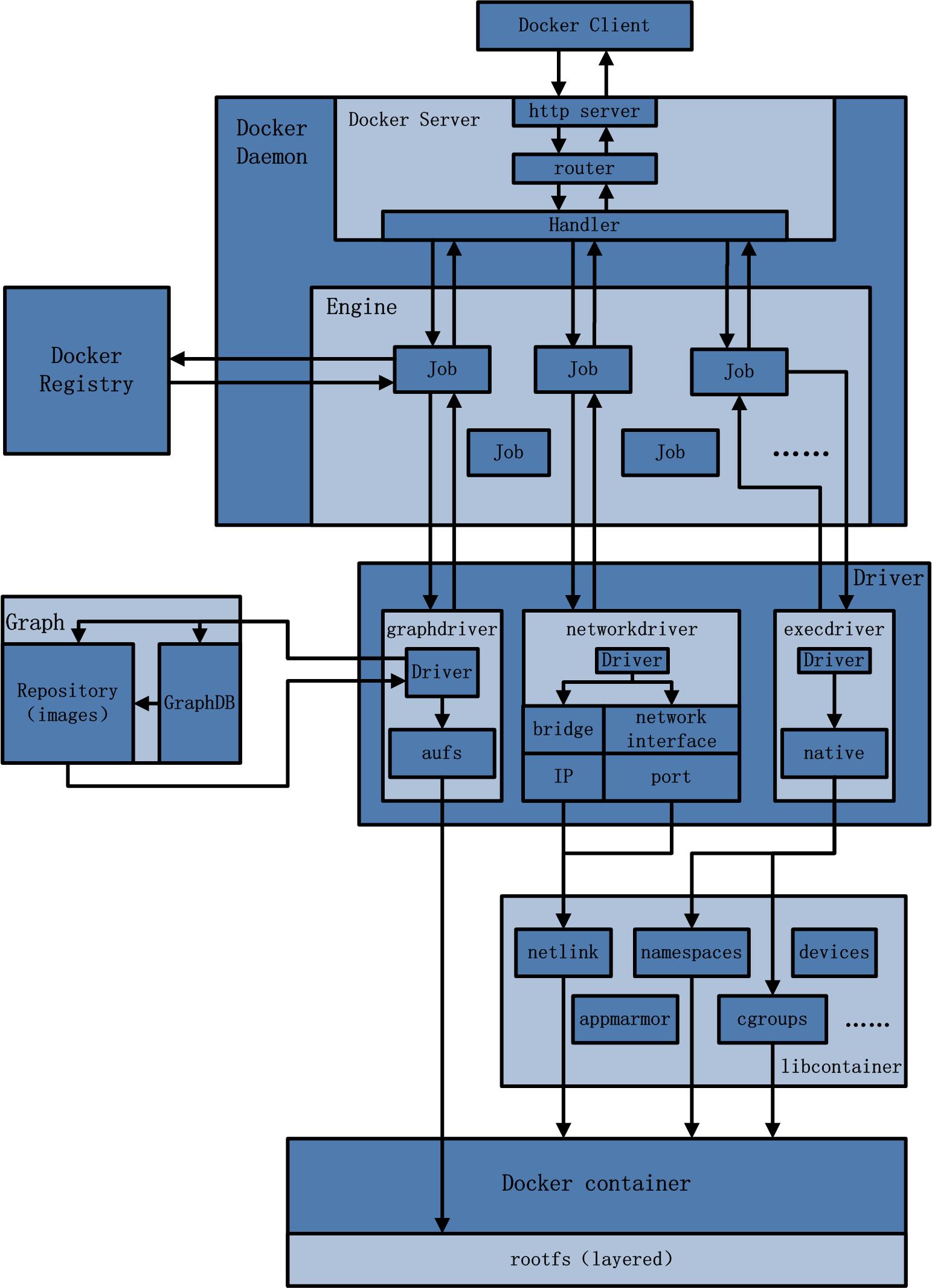
- Docker Daemon作为Docker架构中的主体部分,首先提供Server的功能使其可以接受Docker Client的请求;而后Engine执行Docker内部的一系列工作,每一项工作都是以一个Job的形式的存在。
- Job的运行过程中,当需要容器镜像时,则从Docker Registry中下载镜像,并通过镜像管理驱动graphdriver将下载镜像以Graph的形式存储;当需要为Docker创建网络环境时,通过网络管理驱动networkdriver创建并配置Docker容器网络环境;当需要限制Docker容器运行资源或执行用户指令等操作时,则通过execdriver来完成。
- 而libcontainer是一项独立的容器管理包,networkdriver以及execdriver都是通过libcontainer来实现具体对容器进行的操作。当执行完运行容器的命令后,一个实际的Docker容器就处于运行状态,该容器拥有独立的文件系统,独立并且安全的运行环境等。
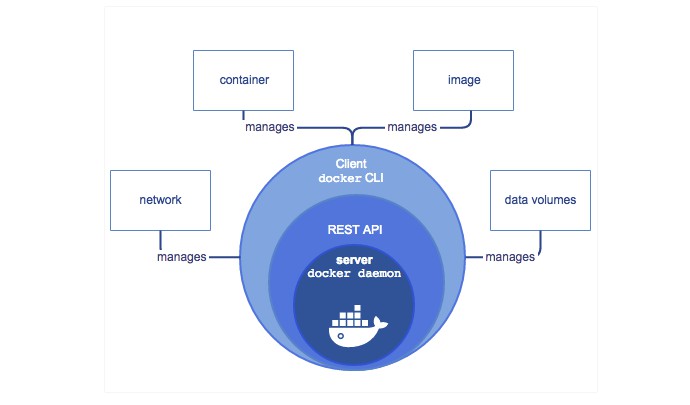
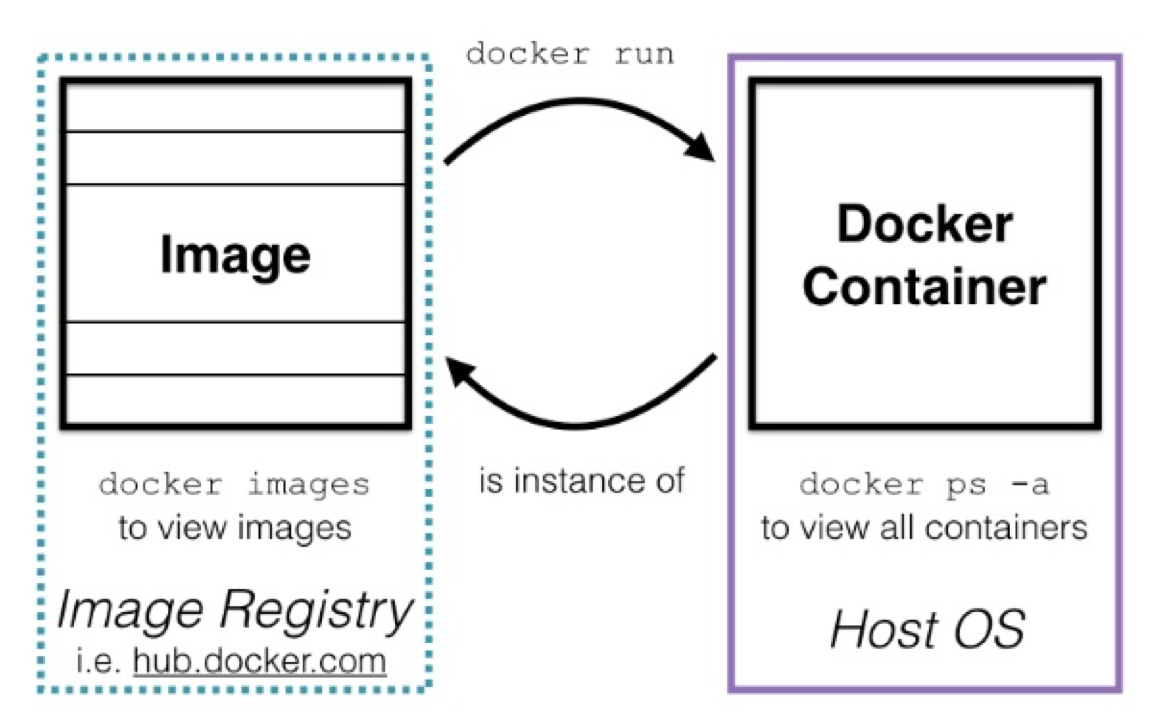
再来看看另外一个架构,这个个架构就简单清晰指明了server/client交互,容器和镜像、数据之间的一些联系
docker client
docker client 是docker架构中用户用来和docker daemon建立通信的客户端,用户使用的可执行文件为docker,通过docker命令行工具可以发起众多管理container的请求
docker client可以通过以下方式和docker daemon建立通信:
- tcp://host:port
- unix:path_to_socket
- fd://socketfd
docker client可以通过设置命令行flag参数的形式设置安全传输层协议(TLS)的有关参数,保证传输的安全性
docker client发送容器管理请求后,由docker daemon接受并处理请求,当docker client 接收到返回的请求相应并简单处理后,docker client 一次完整的生命周期就结束了,当需要继续发送容器管理请求时,用户必须再次通过docker可以执行文件创建docker client。
docker daemon
docker daemon 是docker架构中一个常驻在后台的系统进程,功能是:接收处理docker client发送的请求。该守护进程在后台启动一个server,server负载接受docker client发送的请求;接受请求后,server通过路由与分发调度,找到相应的handler来执行请求。
docker daemon启动所使用的可执行文件也为docker,与docker client启动所使用的可执行文件docker相同,在docker命令执行时,通过传入的参数来判别docker daemon与docker client。
docker daemon的架构可以分为:docker server、engine、job。daemon
docker server
docker server在docker架构中时专门服务于docker client的server,该server的功能时:接受并调度分发docker client发送的请求。
在Docker的启动过程中,通过包gorilla/mux(golang的类库解析),创建了一个mux.Router,提供请求的路由功能。在Golang中,gorilla/mux是一个强大的URL路由器以及调度分发器。该mux.Router中添加了众多的路由项,每一个路由项由HTTP请求方法(PUT、POST、GET或DELETE)、URL、Handler三部分组成。
若Docker Client通过HTTP的形式访问Docker Daemon,创建完mux.Router之后,Docker将Server的监听地址以及mux.Router作为参数,创建一个httpSrv=http.Server{},最终执行httpSrv.Serve()为请求服务。
在Server的服务过程中,Server在listener上接受Docker Client的访问请求,并创建一个全新的goroutine来服务该请求。在goroutine中,首先读取请求内容,然后做解析工作,接着找到相应的路由项,随后调用相应的Handler来处理该请求,最后Handler处理完请求之后回复该请求。
需要注意的是:Docker Server的运行在Docker的启动过程中,是靠一个名为”serveapi”的job的运行来完成的。原则上,Docker Server的运行是众多job中的一个,但是为了强调Docker Server的重要性以及为后续job服务的重要特性,将该”serveapi”的job单独抽离出来分析,理解为Docker Server。
engine
Engine是Docker架构中的运行引擎,同时也Docker运行的核心模块。它扮演Docker container存储仓库的角色,并且通过执行job的方式来操纵管理这些容器。
在Engine数据结构的设计与实现过程中,有一个handler对象。该handler对象存储的都是关于众多特定job的handler处理访问。举例说明,Engine的handler对象中有一项为:{“create”: daemon.ContainerCreate,},则说明当名为”create”的job在运行时,执行的是daemon.ContainerCreate的handler。
job
一个Job可以认为是Docker架构中Engine内部最基本的工作执行单元。Docker可以做的每一项工作,都可以抽象为一个job。例如:在容器内部运行一个进程,这是一个job;创建一个新的容器,这是一个job,从Internet上下载一个文档,这是一个job;包括之前在Docker Server部分说过的,创建Server服务于HTTP的API,这也是一个job,等等。
Job的设计者,把Job设计得与Unix进程相仿。比如说:Job有一个名称,有参数,有环境变量,有标准的输入输出,有错误处理,有返回状态等。
docker registry
Docker Registry是一个存储容器镜像的仓库。而容器镜像是在容器被创建时,被加载用来初始化容器的文件架构与目录。
在Docker的运行过程中,Docker Daemon会与Docker Registry通信,并实现搜索镜像、下载镜像、上传镜像三个功能,这三个功能对应的job名称分别为”search”,”pull” 与 “push”。
其中,在Docker架构中,Docker可以使用公有的Docker Registry,即大家熟知的Docker Hub,如此一来,Docker获取容器镜像文件时,必须通过互联网访问Docker Hub;同时Docker也允许用户构建本地私有的Docker Registry,这样可以保证容器镜像的获取在内网完成。
Graph
Graph在Docker架构中扮演已下载容器镜像的保管者,以及已下载容器镜像之间关系的记录者。一方面,Graph存储着本地具有版本信息的文件系统镜像,另一方面也通过GraphDB记录着所有文件系统镜像彼此之间的关系。
其中,GraphDB是一个构建在SQLite之上的小型图数据库,实现了节点的命名以及节点之间关联关系的记录。它仅仅实现了大多数图数据库所拥有的一个小的子集,但是提供了简单的接口表示节点之间的关系。
同时在Graph的本地目录中,关于每一个的容器镜像,具体存储的信息有:该容器镜像的元数据,容器镜像的大小信息,以及该容器镜像所代表的具体rootfs。
driver
Driver是Docker架构中的驱动模块。通过Driver驱动,Docker可以实现对Docker容器执行环境的定制。由于Docker运行的生命周期中,并非用户所有的操作都是针对Docker容器的管理,另外还有关于Docker运行信息的获取,Graph的存储与记录等。因此,为了将Docker容器的管理从Docker Daemon内部业务逻辑中区分开来,设计了Driver层驱动来接管所有这部分请求。
在Docker Driver的实现中,可以分为以下三类驱动:graphdriver、networkdriver和execdriver。
- graphdriver主要用于完成容器镜像的管理,包括存储与获取。即当用户需要下载指定的容器镜像时,graphdriver将容器镜像存储在本地的指定目录;同时当用户需要使用指定的容器镜像来创建容器的rootfs时,graphdriver从本地镜像存储目录中获取指定的容器镜像。 在graphdriver的初始化过程之前,有4种文件系统或类文件系统在其内部注册,它们分别是aufs、btrfs、vfs和devmapper。而Docker在初始化之时,通过获取系统环境变量”DOCKER_DRIVER”来提取所使用driver的指定类型。而之后所有的graph操作,都使用该driver来执行。
- networkdriver的用途是完成Docker容器网络环境的配置,其中包括Docker启动时为Docker环境创建网桥;Docker容器创建时为其创建专属虚拟网卡设备;以及为Docker容器分配IP、端口并与宿主机做端口映射,设置容器防火墙策略等。networkdriver的架构如下:
- execdriver作为Docker容器的执行驱动,负责创建容器运行命名空间,负责容器资源使用的统计与限制,负责容器内部进程的真正运行等。在execdriver的实现过程中,原先可以使用LXC驱动调用LXC的接口,来操纵容器的配置以及生命周期,而现在execdriver默认使用native驱动,不依赖于LXC。具体体现在Daemon启动过程中加载的ExecDriverflag参数,该参数在配置文件已经被设为”native”。这可以认为是Docker在1.2版本上一个很大的改变,或者说Docker实现跨平台的一个先兆。execdriver架构如下:
libcontainer
libcontainer是Docker架构中一个使用Go语言设计实现的库,设计初衷是希望该库可以不依靠任何依赖,直接访问内核中与容器相关的API。
正是由于libcontainer的存在,Docker可以直接调用libcontainer,而最终操纵容器的namespace、cgroups、apparmor、网络设备以及防火墙规则等。这一系列操作的完成都不需要依赖LXC或者其他包。libcontainer架构如下:
另外,libcontainer提供了一整套标准的接口来满足上层对容器管理的需求。或者说,libcontainer屏蔽了Docker上层对容器的直接管理。又由于libcontainer使用Go这种跨平台的语言开发实现,且本身又可以被上层多种不同的编程语言访问,因此很难说,未来的Docker就一定会紧紧地和Linux捆绑在一起。而于此同时,Microsoft在其著名云计算平台Azure中,也添加了对Docker的支持,可见Docker的开放程度与业界的火热度。
暂不谈Docker,由于libcontainer的功能以及其本身与系统的松耦合特性,很有可能会在其他以容器为原型的平台出现,同时也很有可能催生出云计算领域全新的项目。
docker container
Docker container(Docker容器)是Docker架构中服务交付的最终体现形式,Docker按照用户的需求与指令,订制相应的Docker容器。
用户通过指定容器镜像,使得Docker容器可以自定义rootfs等文件系统; 用户通过指定计算资源的配额,使得Docker容器使用指定的计算资源; 用户通过配置网络及其安全策略,使得Docker容器拥有独立且安全的网络环境; 用户通过指定运行的命令,使得Docker容器执行指定的工作。
原理
docker在版本0.9之前是以lxc(linux container)为基础的,0.9以后又引入了自己开发的libcontainer,也就是现在的containerd的前生,试图设计出更加通用的容器化技术。
docker采用c/s架构,服务端默认在后台运行,进行容器的创建等相关操作,客户端就是我们调用的命令行操作,每次客户端运行完就会退出等待再次调用,客户端和服务端是通过socket进行通信的,默认是unix:///var/run/docker.sock,可以通过-H参数修改端口。
docker是一种轻量级的操作系统虚拟化方案,基于LXC,相对于传统的vm,它只虚拟来操作系统而没有虚拟内核,基于docker engine共享内核,即虚拟出运行库即可运行app,而传统的vm都是虚拟出完整的内核和运行库文件的操作系统。即虚拟出运行库即可运行app,而传统的vm都是虚拟出完整的内核和运行库文件的操作系统。
docker引擎原理
一旦“程序”被执行起来,它就从磁盘上的二进制文件,变成了计算机内存中的数据、寄存器里的值、堆栈中的指令、被打开的文件,以及各种设备的状态信息的一个集合,这就是进程。
容器技术的核心功能,就是通过约束和修改进程的动态表现,从而为其创造出一个“边界”,同时切换拷贝设置其根文件系统。
一个“容器”,实际上是一个由 Linux Namespace、Linux Cgroups 和 rootfs 三种技术构建出来的进程的隔离环境。
对于 Docker 等大多数 Linux 容器来说,Cgroups 技术是用来制造约束的主要手段,而 Namespace 技术则是用来修改进程视图的主要方法。
namespace
Linux内核实现namespace的主要目的就是为了实现轻量级虚拟化(容器)服务。在同一个namespace下的进程可以感知彼此的变化,而对外界的进程一无所知。这样就可以让容器中的进程产生错觉,仿佛自己置身于一个独立的系统环境中,以此达到独立和隔离的目的。
命名空间提供对于某个进程的一种“视图”,可以将其它命名空间的东西隐藏,从而为该进程提供它自己独立运行的环境。这使得进程之间互相不可见,也不可相互影响,命名空间包括如下:
IPC:隔离System V IPC和POSIX消息队列。
Network:隔离网络资源。
Mount:隔离文件系统挂载点。每个容器能看到不同的文件系统层次结构。
PID:隔离进程ID。
UTS:隔离主机名和域名。
User:隔离用户ID和组ID。
Docker 引擎在 Linux 上使用以下 namesspaces:
pid namespace:进程隔离(PID: Process ID)
net namespace:管理网络接口(NET: Networking)
ipc namespace:管理访问 IPC 资源(IPC: InterProcess Communication)
mnt namespace:管理文件系统挂载点(MNT: Mount)
uts namespace:隔离内核和版本标识符(UTS: Unix Timesharing System)
实例
让我们首先创建一个容器来试试。
$ docker run -it busybox /bin/sh
/ #
此时,如果我们在容器里执行一下 ps 指令,就会发现一些更有趣的事情:
/ # ps
PID USER TIME COMMAND
1 root 0:00 /bin/sh
10 root 0:00 ps
可以看到,我们在 Docker 里最开始执行的 /bin/sh,就是这个容器内部的第 1 号进程(PID=1),而这个容器里一共只有两个进程在运行。这就意味着,前面执行的 /bin/sh,以及我们刚刚执行的 ps,已经被 Docker 隔离在了一个跟宿主机完全不同的世界当中。
这种机制,其实就是对被隔离应用的进程空间做了手脚,使得这些进程只能看到重新计算过的进程编号,比如 PID=1。可实际上,他们在宿主机的操作系统里,还是原来的第 100 号进程。
总结
虚拟机是完整的虚拟出文件系统和内核,在geustos的基础上有很好的隔离性,所以一个虚拟机的镜像都是几个G。
docker其实是在虚拟机的基础,进行namespaces的隔离,和虚拟机是共享操作系统内核的,所以一个docker镜像只有几十M到几百M,但是隔离性远不如虚拟机,
- 容器之间是共享内核的,宿主机内核不能兼容的docker肯定也是不能兼容的
- 很多资源是无法隔离的,比如时间是无法用namespace来隔离的,你修改一个namespace的时间会影响宿主机上的时间。
所以docker引擎其实只是做了隔离和虚拟机的hypervisor并不是一个级别的。在理解了 Namespace 的工作方式之后,你就会明白,跟真实存在的虚拟机不同,在使用 Docker 的时候,并没有一个真正的“Docker 容器”运行在宿主机里面。Docker 项目帮助用户启动的,还是原来的应用进程,只不过在创建这些进程时,Docker 为它们加上了各种各样的 Namespace 参数。这时,这些进程就会觉得自己是各自 PID Namespace 里的第 1 号进程,只能看到各自 Mount Namespace 里挂载的目录和文件,只能访问到各自 Network Namespace 里的网络设备,就仿佛运行在一个个“容器”里面,与世隔绝。
虚拟机是真是存在的,docker容器并不是真实存在的,而是一个被隔离和约束的特殊的进程。
cgroup
Linux 上的 Docker 引擎依赖的另外一项技术叫 control groups ( cgroups ),cgroup和namespace类似,也是将进程进行分组,但它的目的和namespace不一样,namespace是为了隔离进程组之间的资源,而cgroup是为了对一组进程进行统一的资源监控和限制,这些资源主要包括CPU、内存、block I/O和网络带宽。资源限制的意思就是如设定应用运行时使用内存的上限,一旦超过这个配额就发出OOM(Out of Memory)。
虽然容器内的第 1 号进程在“障眼法”的干扰下只能看到容器里的情况,但是宿主机上,它作为第 100 号进程与其他所有进程之间依然是平等的竞争关系。这就意味着,虽然第 100 号进程表面上被隔离了起来,但是它所能够使用到的资源(比如 CPU、内存),却是可以随时被宿主机上的其他进程(或者其他容器)占用的。当然,这个 100 号进程自己也可能把所有资源吃光。这些情况,显然都不是一个“沙盒”应该表现出来的合理行为。
Cgroups提供了以下四大功能:
- 资源限制(Resource Limitation):cgroups可以对进程组使用的资源总额进行限制。
- 优先级分配(Prioritization):通过分配的CPU时间片数量及硬盘IO带宽大小,实际上就相当于控制了进程运行的优先级。
- 资源统计(Accounting): cgroups可以统计系统的资源使用量,如CPU使用时长、内存用量等等,这个功能非常适用于计费。
- 进程控制(Control):cgroups可以对进程组执行挂起、恢复等操作。
Cgroups的子系统可以通过查看文件系统目录/sys/fs/cgroup/来查看
# ls /sys/fs/cgroup/
blkio/ cpuacct/ cpuset/ freezer/ memory/ net_cls,net_prio/ perf_event/ rdma/
cpu/ cpu,cpuacct/ devices/ hugetlb/ net_cls/ net_prio/ pids/ systemd/
我们可以看出移动有如下子系统
devices:设备权限控制。
cpuset:分配指定的CPU和内存节点。
cpu:控制CPU占用率。
CPU资源的控制也有两种策略,一种是完全公平调度 (CFS:Completely Fair Scheduler)策略,提供了限额和按比例分配两种方式进行资源控制;另一种是实时调度(Real-Time Scheduler)策略,针对实时进程按周期分配固定的运行时间。
cpuacct:统计CPU使用情况。
memory:限制内存的使用上限。
memory.limit_bytes:强制限制最大内存使用量,单位有k、m、g三种,填-1则代表无限制。
memory.usage_bytes:报告该 cgroup中进程使用的当前总内存用量(以字节为单位)。
memory.max_usage_bytes:报告该 cgroup 中进程使用的最大内存用量。
freezer:冻结(暂停)Cgroup中的进程。
net_cls:配合tc(traffic controller)限制网络带宽。
net_prio:设置进程的网络流量优先级。
huge_tlb:限制HugeTLB的使用。
perf_event:允许Perf工具基于Cgroup分组做性能监测。
实例
我们在来看看具体的cpu文件
$ ls /sys/fs/cgroup/cpu
cgroup.clone_children cpu.cfs_period_us cpu.rt_period_us cpu.shares notify_on_release
cgroup.procs cpu.cfs_quota_us cpu.rt_runtime_us cpu.stat tasks
如果熟悉 Linux CPU 管理的话,你就会在它的输出里注意到 cfs_period 和 cfs_quota 这样的关键词。这两个参数需要组合使用,可以用来限制进程在长度为 cfs_period 的一段时间内,只能被分配到总量为 cfs_quota 的 CPU 时间。
我们现在进入 /sys/fs/cgroup/cpu 目录下:
root@ubuntu:/sys/fs/cgroup/cpu$ mkdir container
root@ubuntu:/sys/fs/cgroup/cpu$ ls container/
cgroup.clone_children cpu.cfs_period_us cpu.rt_period_us cpu.shares notify_on_release
cgroup.procs cpu.cfs_quota_us cpu.rt_runtime_us cpu.stat tasks
这个目录就称为一个“控制组”。你会发现,操作系统会在你新创建的 container 目录下,自动生成该子系统对应的资源限制文件。
现在,我们在后台执行这样一条脚本:
$ while : ; do : ; done &
[1] 226
显然,它执行了一个死循环,可以把计算机的 CPU 吃到 100%,根据它的输出,我们可以看到这个脚本在后台运行的进程号(PID)是 226。这样,我们可以用 top 指令来确认一下 CPU 有没有被打满:
$ top
%Cpu0 :100.0 us, 0.0 sy, 0.0 ni, 0.0 id, 0.0 wa, 0.0 hi, 0.0 si, 0.0 st
在输出里可以看到,CPU 的使用率已经 100% 了(%Cpu0 :100.0 us)。而此时,我们可以通过查看 container 目录下的文件,看到 container 控制组里的 CPU quota 还没有任何限制(即:-1),CPU period 则是默认的 100 ms(100000 us):
$ cat /sys/fs/cgroup/cpu/container/cpu.cfs_quota_us
-1
$ cat /sys/fs/cgroup/cpu/container/cpu.cfs_period_us
100000
我们可以通过修改这些文件的内容来设置限制。比如,向 container 组里的 cfs_quota 文件写入 20 ms(20000 us):
$ echo 20000 > /sys/fs/cgroup/cpu/container/cpu.cfs_quota_us
它意味着在每 100 ms 的时间里,被该控制组限制的进程只能使用 20 ms 的 CPU 时间,也就是说这个进程只能使用到 20% 的 CPU 带宽。接下来,我们把被限制的进程的 PID 写入 container 组里的 tasks 文件,上面的设置就会对该进程生效了:
$ echo 226 > /sys/fs/cgroup/cpu/container/tasks
我们可以用 top 指令查看一下
$ top
%Cpu0 : 20.3 us, 0.0 sy, 0.0 ni, 79.7 id, 0.0 wa, 0.0 hi, 0.0 si, 0.0 st
可以看到,计算机的 CPU 使用率立刻降到了 20%(%Cpu0 : 20.3 us)。
总结
容器是一个“单进程”模型。由于一个容器的本质就是一个进程,用户的应用进程实际上就是容器里 PID=1 的进程,也是其他后续创建的所有进程的父进程。这就意味着,在一个容器中,你没办法同时运行两个不同的应用,除非你能事先找到一个公共的 PID=1 的程序来充当两个不同应用的父进程,这也是为什么很多人都会用 systemd 或者 supervisord 这样的软件来代替应用本身作为容器的启动进程。还有其他更好的解决办法。这是因为容器本身的设计,就是希望容器和应用能够同生命周期,这个概念对后续的容器编排非常重要。否则,一旦出现类似于“容器是正常运行的,但是里面的应用早已经挂了”的情况,编排系统处理起来就非常麻烦了。
linux cgroups就是一个子系统目录加上一组资源限制文件的组合。
不足
跟 Namespace 的情况类似,Cgroups 对资源的限制能力也有很多不完善的地方,被提及最多的自然是 /proc 文件系统的问题。众所周知,Linux 下的 /proc 目录存储的是记录当前内核运行状态的一系列特殊文件,用户可以通过访问这些文件,查看系统以及当前正在运行的进程的信息,比如 CPU 使用情况、内存占用率等,这些文件也是 top 指令查看系统信息的主要数据来源。但是,你如果在容器里执行 top 指令,就会发现,它显示的信息居然是宿主机的 CPU 和内存数据,而不是当前容器的数据。造成这个问题的原因就是,/proc 文件系统并不知道用户通过 Cgroups 给这个容器做了什么样的资源限制,即:/proc 文件系统不了解 Cgroups 限制的存在。在生产环境中,这个问题必须进行修正,否则应用程序在容器里读取到的 CPU 核数、可用内存等信息都是宿主机上的数据,这会给应用的运行带来非常大的困惑和风险。这也是在企业中,容器化应用碰到的一个常见问题,也是容器相较于虚拟机另一个不尽如人意的地方。
一般使用最新版本的cgroup namespace来隔离。
rootfs
Mount Namespace对容器进程视图的改变,一定是伴随着挂载操作(mount)才能生效,可是,作为一个普通用户,我们希望的是一个更友好的情况:每当创建一个新容器时,我希望容器进程看到的文件系统就是一个独立的隔离环境,而不是继承自宿主机的文件系统。怎么才能做到这一点呢?不难想到,我们可以在容器进程启动之前重新挂载它的整个根目录“/”。而由于 Mount Namespace 的存在,这个挂载对宿主机不可见,所以容器进程就可以在里面随便折腾了。在 Linux 操作系统里,有一个名为 chroot 的命令可以帮助你在 shell 中方便地完成这个工作。顾名思义,它的作用就是帮你“change root file system”,即改变进程的根目录到你指定的位置。
实际上,Mount Namespace 正是基于对 chroot 的不断改良才被发明出来的,它也是 Linux 操作系统里的第一个 Namespace。为了能够让容器的这个根目录看起来更“真实”,我们一般会在这个容器的根目录下挂载一个完整操作系统的文件系统,比如 Ubuntu16.04 的 ISO。这样,在容器启动之后,我们在容器里通过执行 “ls /” 查看根目录下的内容,就是 Ubuntu 16.04 的所有目录和文件。而这个挂载在容器根目录上、用来为容器进程提供隔离后执行环境的文件系统,就是所谓的“容器镜像”。它还有一个更为专业的名字,叫作:rootfs(根文件系统)。所以,一个最常见的 rootfs,或者说容器镜像,会包括如下所示的一些目录和文件,比如 /bin,/etc,/proc 等等:
$ ls /
bin dev etc home lib lib64 mnt opt proc root run sbin sys tmp usr var
所以进入容器之后执行的 /bin/bash,就是 /bin 目录下的可执行文件,与宿主机的 /bin/bash 完全不同。
rootfs 只是一个操作系统所包含的文件、配置和目录,并不包括操作系统内核。在 Linux 操作系统中,这两部分是分开存放的,操作系统只有在开机启动时才会加载指定版本的内核镜像,同一台机器上的所有容器,都共享宿主机操作系统的内核。
通过结合使用 Mount Namespace 和 rootfs,容器就能够为进程构建出一个完善的文件系统隔离环境。
实例
假设,我们现在有一个 $HOME/test 目录,想要把它作为一个 /bin/bash 进程的根目录。首先,创建一个 test 目录和几个 lib 文件夹:
$ mkdir -p $HOME/test
$ mkdir -p $HOME/test/{bin,lib64,lib}
然后,把 bash 命令拷贝到 test 目录对应的 bin 路径下:
$ cp -v /bin/{bash,ls} $HOME/test/bin
接下来,把 bash 命令需要的所有 so 文件,也拷贝到 test 目录对应的 lib 路径下。找到 so 文件可以用 ldd 命令:
$ T=$HOME/test
$ list="$(ldd /bin/ls | egrep -o '/lib.*\.[0-9]')"
$ for i in $list; do cp -v "$i" "${T}${i}"; done
最后,执行 chroot 命令,告诉操作系统,我们将使用 $HOME/test 目录作为 /bin/bash 进程的根目录:
$ chroot $HOME/test /bin/bash
这时,你如果执行 “ls /“,就会看到,它返回的都是 $HOME/test 目录下面的内容,而不是宿主机的内容。
一致性
正是由于 rootfs 的存在,容器才有了一个被反复宣传至今的重要特性:一致性。
由于 rootfs 里打包的不只是应用,而是整个操作系统的文件和目录,也就意味着,应用以及它运行所需要的所有依赖,都被封装在了一起。
有了容器镜像“打包操作系统”的能力,这个最基础的依赖环境也终于变成了应用沙盒的一部分。这就赋予了容器所谓的一致性:无论在本地、云端,还是在一台任何地方的机器上,用户只需要解压打包好的容器镜像,那么这个应用运行所需要的完整的执行环境就被重现出来了。这种深入到操作系统级别的运行环境一致性,打通了应用在本地开发和远端执行环境之间难以逾越的鸿沟。
images
Docker 在镜像的设计中,引入了层(layer)的概念。也就是说,用户制作镜像的每一步操作,都会生成一个层,也就是一个增量 rootfs。当然,这个想法不是凭空臆造出来的,而是用到了一种叫作联合文件系统(Union File System)的能力。
UFS
Union File System 也叫 UnionFS,最主要的功能是将多个不同位置的目录联合挂载(union mount)到同一个目录下。比如,我现在有两个目录 A 和 B,它们分别有两个文件:
$ tree
.
├── A
│ ├── a
│ └── x
└── B
├── b
└── x
然后,我使用联合挂载的方式,将这两个目录挂载到一个公共的目录 C 上:
$ mkdir C
$ mount -t aufs -o dirs=./A:./B none ./C
这时,我再查看目录 C 的内容,就能看到目录 A 和 B 下的文件被合并到了一起:
$ tree ./C
./C
├── a
├── b
└── x
可以看到,在这个合并后的目录 C 里,有 a、b、x 三个文件,并且 x 文件只有一份。这,就是“合并”的含义。此外,如果你在目录 C 里对 a、b、x 文件做修改,这些修改也会在对应的目录 A、B 中生效。
AuFS 的全称是 Another UnionFS,后改名为 Alternative UnionFS,再后来干脆改名叫作 Advance UnionFS,它是对 Linux 原生 UnionFS 的重写和改进。对于 AuFS 来说,它最关键的目录结构在 /var/lib/docker 路径下的 diff 目录:
/var/lib/docker/aufs/diff/<layer_id>
实例
我们启动一个容器,比如:
$ docker run -d ubuntu:latest sleep 3600
这时候,Docker 就会从 Docker Hub 上拉取一个 Ubuntu 镜像到本地。这个所谓的“镜像”,实际上就是一个 Ubuntu 操作系统的 rootfs,它的内容是 Ubuntu 操作系统的所有文件和目录。不过,与之前我们讲述的 rootfs 稍微不同的是,Docker 镜像使用的 rootfs,往往由多个“层”组成:
$ docker image inspect ubuntu:latest
...
"RootFS": {
"Type": "layers",
"Layers": [
"sha256:f49017d4d5ce9c0f544c...",
"sha256:8f2b771487e9d6354080...",
"sha256:ccd4d61916aaa2159429...",
"sha256:c01d74f99de40e097c73...",
"sha256:268a067217b5fe78e000..."
]
}
可以看到,这个 Ubuntu 镜像,实际上由五个层组成。这五个层就是五个增量 rootfs,每一层都是 Ubuntu 操作系统文件与目录的一部分;而在使用镜像时,Docker 会把这些增量联合挂载在一个统一的挂载点上(等价于前面例子里的“/C”目录)。这个挂载点就是 /var/lib/docker/aufs/mnt/,比如:
/var/lib/docker/aufs/mnt/6e3be5d2ecccae7cc0fcfa2a2f5c89dc21ee30e166be823ceaeba15dce645b3e
不出意外的,这个目录里面正是一个完整的 Ubuntu 操作系统:
$ ls /var/lib/docker/aufs/mnt/6e3be5d2ecccae7cc0fcfa2a2f5c89dc21ee30e166be823ceaeba15dce645b3e
bin boot dev etc home lib lib64 media mnt opt proc root run sbin srv sys tmp usr var
那么,前面提到的五个镜像层,又是如何被联合挂载成这样一个完整的 Ubuntu 文件系统的呢?这个信息记录在 AuFS 的系统目录 /sys/fs/aufs 下面。首先,通过查看 AuFS 的挂载信息,我们可以找到这个目录对应的 AuFS 的内部 ID(也叫:si):
$ cat /proc/mounts| grep aufs
none /var/lib/docker/aufs/mnt/6e3be5d2ecccae7cc0fc... aufs rw,relatime,si=972c6d361e6b32ba,dio,dirperm1 0 0
即,si=972c6d361e6b32ba。然后使用这个 ID,你就可以在 /sys/fs/aufs 下查看被联合挂载在一起的各个层的信息:
$ cat /sys/fs/aufs/si_972c6d361e6b32ba/br[0-9]*
/var/lib/docker/aufs/diff/6e3be5d2ecccae7cc...=rw
/var/lib/docker/aufs/diff/6e3be5d2ecccae7cc...-init=ro+wh
/var/lib/docker/aufs/diff/32e8e20064858c0f2...=ro+wh
/var/lib/docker/aufs/diff/2b8858809bce62e62...=ro+wh
/var/lib/docker/aufs/diff/20707dce8efc0d267...=ro+wh
/var/lib/docker/aufs/diff/72b0744e06247c7d0...=ro+wh
/var/lib/docker/aufs/diff/a524a729adadedb90...=ro+wh
这些信息里,我们可以看到,镜像的层都放置在 /var/lib/docker/aufs/diff 目录下,然后被联合挂载在 /var/lib/docker/aufs/mnt 里面。
总结
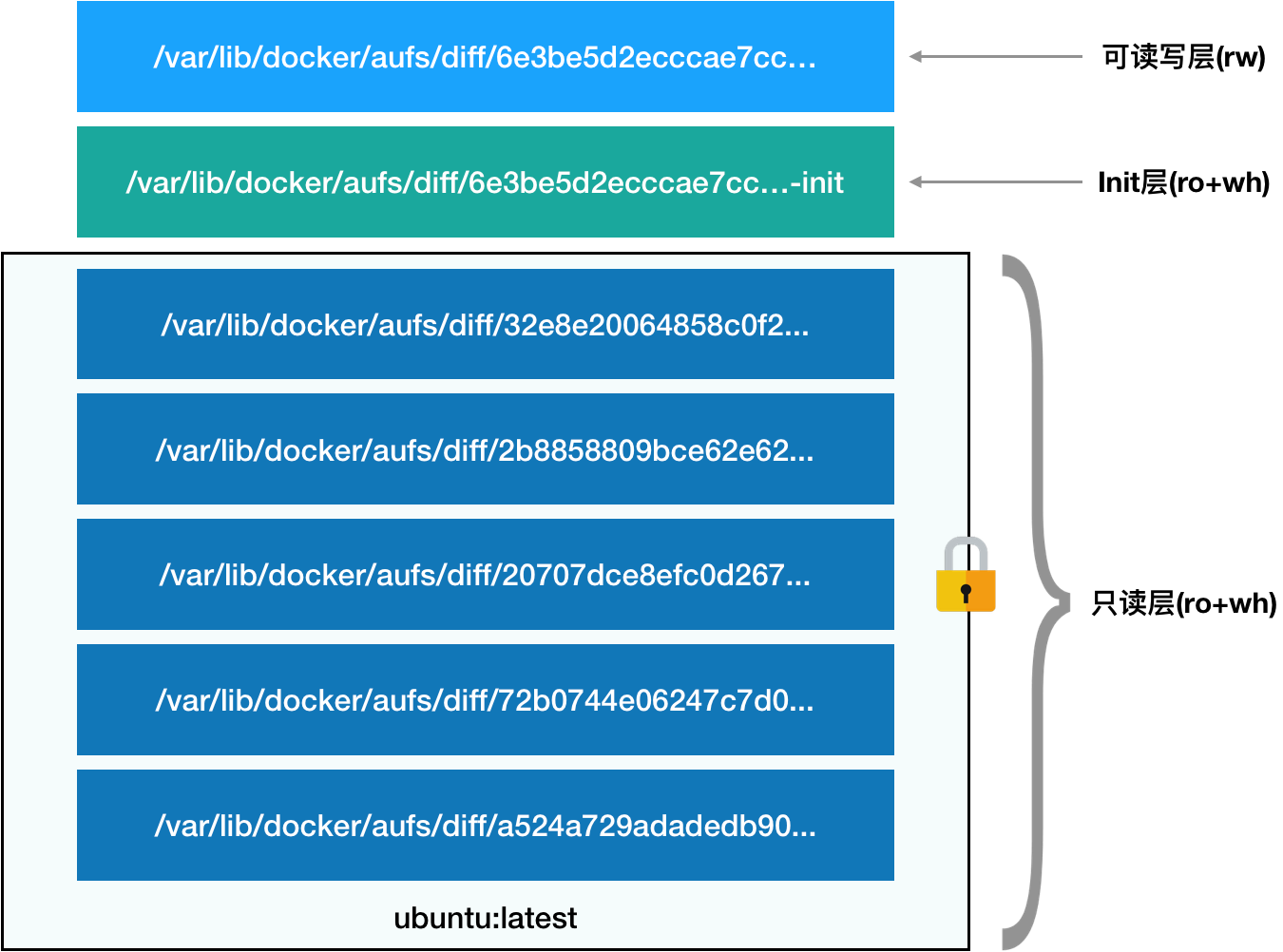
rootfs 由三部分组成:只读层,可读写层,init层
- 只读层是这个容器的 rootfs 最下面的五层,对应的正是 ubuntu:latest 镜像的五层。可以看到,它们的挂载方式都是只读的,这些层,都以增量的方式分别包含了 Ubuntu 操作系统的一部分。
- 可读写层是这个容器的 rootfs 最上面的一层(6e3be5d2ecccae7cc),它的挂载方式为:rw,即 read write。在没有写入文件之前,这个目录是空的。而一旦在容器里做了写操作,你修改产生的内容就会以增量的方式出现在这个层中。如果是删除也不会删除底层的文件,只会做一个标记来屏蔽,叫做白障,最上面这个可读写层的作用,就是专门用来存放你修改 rootfs 后产生的增量,无论是增、删、改,都发生在这里。而当我们使用完了这个被修改过的容器之后,还可以使用 docker commit 和 push 指令,保存这个被修改过的可读写层,并上传到 Docker Hub 上,供其他人使用;而与此同时,原先的只读层里的内容则不会有任何变化。这,就是增量 rootfs 的好处。
- Init 层是 Docker 项目单独生成的一个内部层,专门用来存放 /etc/hosts、/etc/resolv.conf 等信息。
最终,这 7 个层都被联合挂载到 /var/lib/docker/aufs/mnt 目录下,表现为一个完整的 Ubuntu 操作系统供容器使用。
镜像
通过“分层镜像”的设计,以 Docker 镜像为核心,来自不同公司、不同团队的技术人员被紧密地联系在了一起。而且,由于容器镜像的操作是增量式的,这样每次镜像拉取、推送的内容,比原本多个完整的操作系统的大小要小得多;而共享层的存在,可以使得所有这些容器镜像需要的总空间,也比每个镜像的总和要小。这样就使得基于容器镜像的团队协作,要比基于动则几个 GB 的虚拟机磁盘镜像的协作要敏捷得多。更重要的是,一旦这个镜像被发布,那么你在全世界的任何一个地方下载这个镜像,得到的内容都完全一致,可以完全复现这个镜像制作者当初的完整环境。这,就是容器技术“强一致性”的重要体现。。容器镜像的发明,不仅打通了“开发 - 测试 - 部署”流程的每一个环节,更重要的是:容器镜像将会成为未来软件的主流发布方式。
容器镜像,是容器分发的载体,很多时候讲容器镜像比作成集装箱,镜像里面包含了应用以及应用运行所需要的依赖,容器镜像采用分层存储,最底层是bootfs/rootfs, bootfs是最底层,类似于linux的引导文件系统,rootfs是基础镜像,比如这里基础镜像是ubuntu:15.04的系统,之后再基础镜像的基础上去做修改,比如增加应用bin文件,以及对环境变量的设置,每种改动最后在镜像中的表现是依次往上进行叠加的image layer。每一层是只读的,
镜像文件的存储也是采用分层存储,比如多个镜像中存在某一层的内容是相同,那么只会存储一份,极大的节省了存储的成本。如下
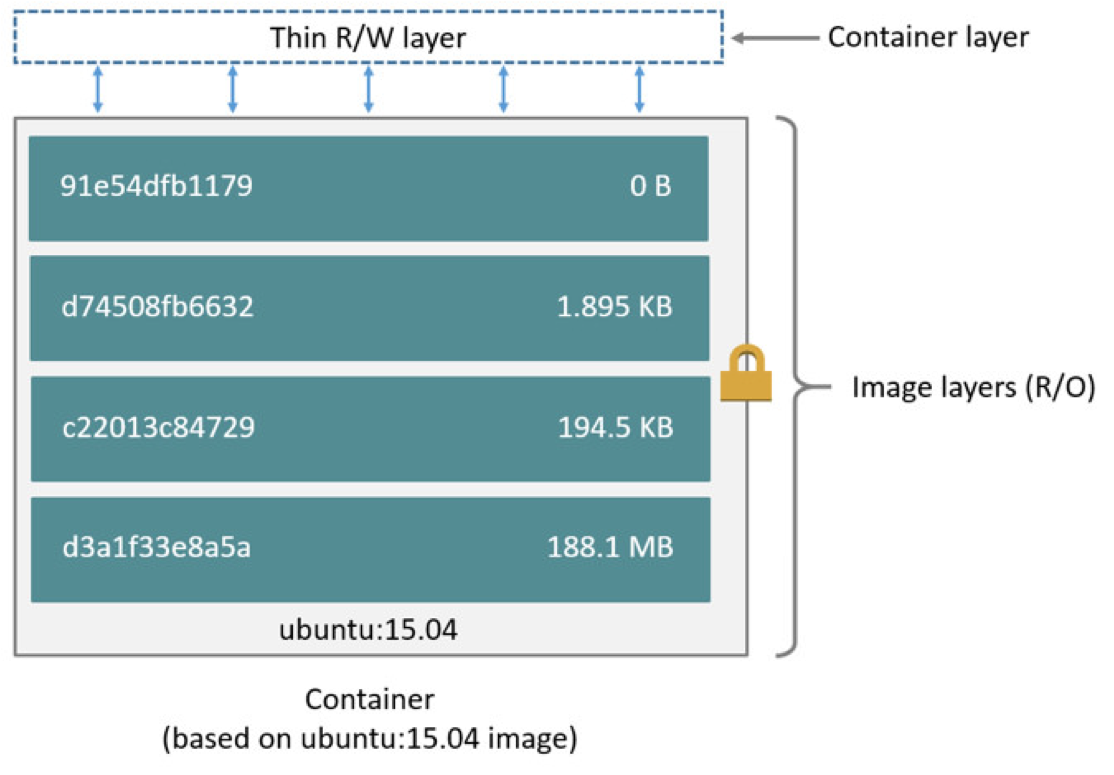
容器运行的时候会加载镜像中的文件系统,利用联合挂载(union mount)技术在已经有的只读文件系统中再挂载一个读写层,容器运行中的对文件系统的改动都会COPY-ON-Writer复制到该层中进行修改,下面的只读层是保持不变,这就是COPY-ON-Writer。当容器删掉之后,这个可读写的层也会消失。
数据卷
Docker 又是如何做到把一个宿主机上的目录或者文件,挂载到容器里面去呢?
当容器进程被创建之后,尽管开启了 Mount Namespace,但是在它执行 chroot(或者 pivot_root)之前,容器进程一直可以看到宿主机上的整个文件系统。
而宿主机上的文件系统,也自然包括了我们要使用的容器镜像。这个镜像的各个层,保存在 /var/lib/docker/aufs/diff 目录下,在容器进程启动后,它们会被联合挂载在 /var/lib/docker/aufs/mnt/ 目录中,这样容器所需的 rootfs 就准备好了。所以,我们只需要在 rootfs 准备好之后,在执行 chroot 之前,把 Volume 指定的宿主机目录(比如 /home 目录),挂载到指定的容器目录(比如 /test 目录)在宿主机上对应的目录(即 /var/lib/docker/aufs/mnt/[可读写层 ID]/test)上,这个 Volume 的挂载工作就完成了。
更重要的是,由于执行这个挂载操作时,“容器进程”已经创建了,也就意味着此时 Mount Namespace 已经开启了。所以,这个挂载事件只在这个容器里可见。你在宿主机上,是看不见容器内部的这个挂载点的。这就保证了容器的隔离性不会被 Volume 打破。这里提到的”容器进程”,是 Docker 创建的一个容器初始化进程 (dockerinit),而不是应用进程 (ENTRYPOINT + CMD)。dockerinit 会负责完成根目录的准备、挂载设备和目录、配置 hostname 等一系列需要在容器内进行的初始化操作。最后,它通过 execv() 系统调用,让应用进程取代自己,成为容器里的 PID=1 的进程。
其实,如果你了解 Linux 内核的话,就会明白,绑定挂载实际上是一个 inode 替换的过程。在 Linux 操作系统中,inode 可以理解为存放文件内容的“对象”,而 dentry,也叫目录项,就是访问这个 inode 所使用的“指针”。正如上图所示,mount –bind /home /test,会将 /home 挂载到 /test 上。其实相当于将 /test 的 dentry,重定向到了 /home 的 inode。这样当我们修改 /test 目录时,实际修改的是 /home 目录的 inode。这也就是为何,一旦执行 umount 命令,/test 目录原先的内容就会恢复:因为修改真正发生在的,是 /home 目录里。
总结
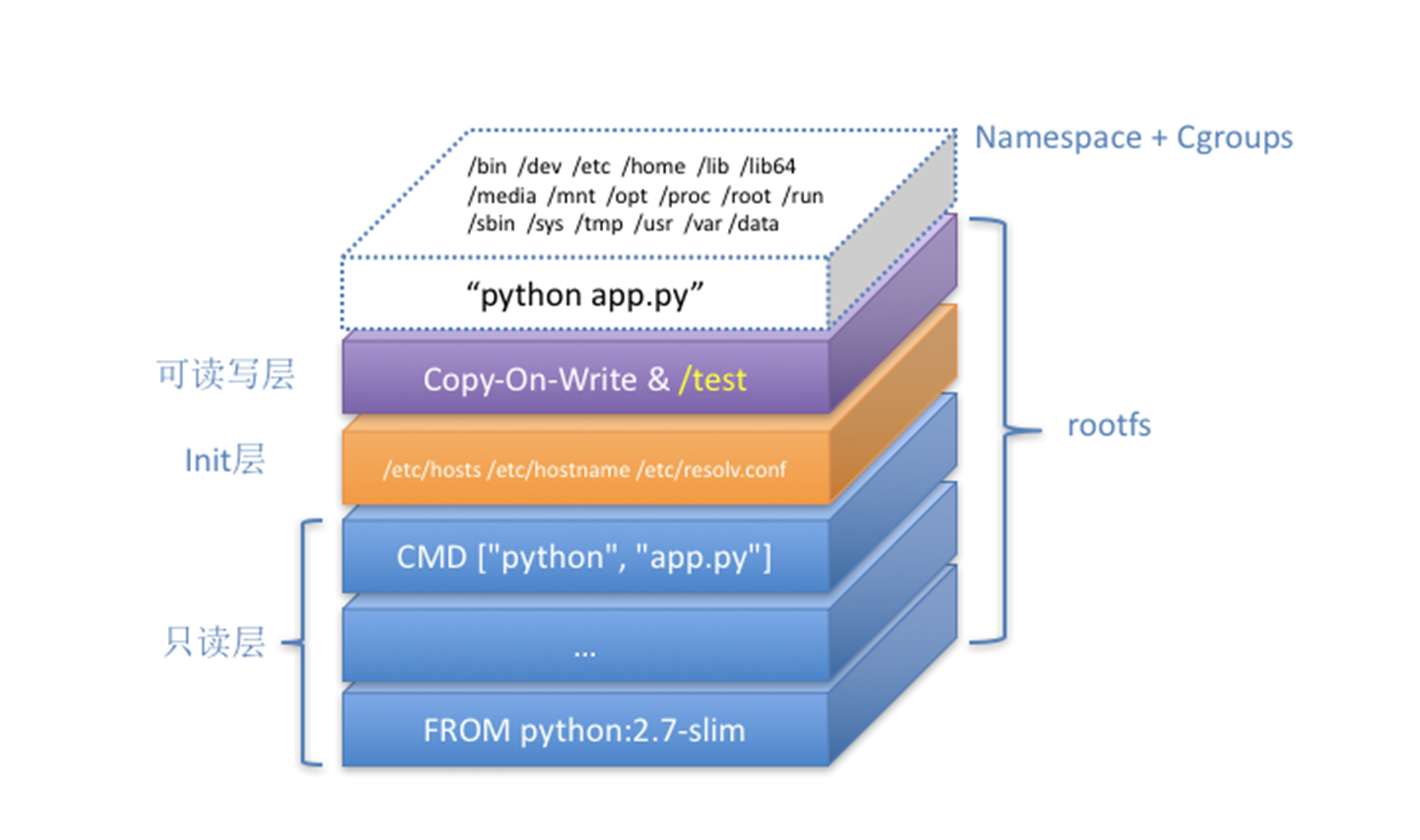
这个容器进程“python app.py”,运行在由 Linux Namespace 和 Cgroups 构成的隔离环境里;而它运行所需要的各种文件,比如 python,app.py,以及整个操作系统文件,则由多个联合挂载在一起的 rootfs 层提供。
这些 rootfs 层的最下层,是来自 Docker 镜像的只读层。
在只读层之上,是 Docker 自己添加的 Init 层,用来存放被临时修改过的 /etc/hosts 等文件。
而 rootfs 的最上层是一个可读写层,它以 Copy-on-Write 的方式存放任何对只读层的修改,容器声明的 Volume 的挂载点,也出现在这一层。
一个正在运行的 Linux 容器,其实可以被“一分为二”地看待:
- 一组联合挂载在 /var/lib/docker/aufs/mnt 上的 rootfs,这一部分我们称为“容器镜像”(Container Image),是容器的静态视图;
- 一个由 Namespace+Cgroups 构成的隔离环境,这一部分我们称为“容器运行时”(Container Runtime),是容器的动态视图。
docker最大的成功就是在容器镜像的制作,使得容器镜像成为发布的事实标准。
docker网络原理
详细说明在docker网络。